全球首个!人形机器人技术新突破 实现任意地形快速站立
近期,上海人工智能实验室、上海交通大学等机构共同发布了一项算法技术,该技术能够使人形机器人从各种状态下实现快速、稳定地站立。这项技术在全球范围内首次实现了在可泛化地形、任意地形下让机器人站起来,而不仅仅是固定的地形和姿态。通过交互学习的技术,机器人可以在不同场景、地形和姿势下直接站起来。

模仿人类“有样学样”是机器人习得技能的重要途径。为此,研究人员开发了一套全新的数据采集遥操作系统,包含上肢外骨骼和下肢脚踏板,操作员的动作能够在机器人身上精准复现。这套系统提高了数据采集效率,未来有望应用于危险环境,如火场或有毒气体场地,使操作员可以在远处操控机器人。

在上海一家人形机器人企业的数据采集中心,2000多平方米的区域内,100台人形机器人正在进行各种训练。企业已经对超过100万条训练数据进行了开源,涵盖家居、零售服务和工业等多种场景。这些多样化的数据有助于训练机器人的大模型。

对于人形机器人来说,真机数据非常匮乏。一个简单的“倒牛奶”动作就需要采集近百条高质量数据。因此,大规模训练对单个企业而言成本较高。

为了解决这一问题,全国首个异构人形机器人训练场在上海建成并投入使用。该训练场集结了来自11家企业的百余台不同品牌、不同结构的人形机器人,有效避免了基础设施的重复建设。通过这个训练场,可以大幅降低训练成本,并加快任务完成速度。例如,简单任务只需两天即可完成,复杂任务也只需不到一周时间。
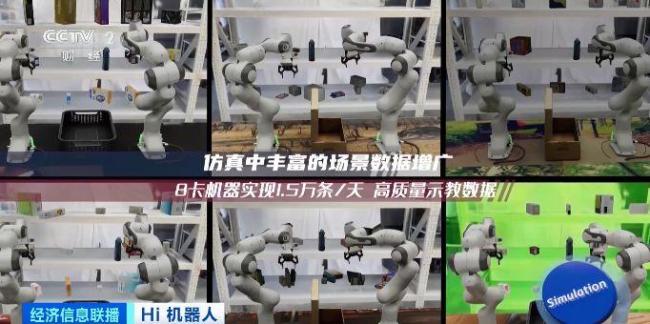
此外,仿真平台也在降低训练成本方面发挥了重要作用。通过GPU加速,仿真平台可以产生大量数据,并大幅提升训练效率。全球首个“城市级”人形机器人仿真训练平台升级版在上海发布,平台在实验环境中实现了路径闭环验证,并向全球开发者开放,支持复杂场景的一键生成。使用仿真平台,单条数据的成本仅为真实世界中的1/500。
以上就是【💥️全球首个!人形机器人技术新突破 实现任意地形快速站立】👉的详细解读和分析,更多命理资讯请访问不思君主页。











精彩评论